
TOP > バックナンバー > Vol.12 No.9 > 給電・充電
給電・充電セッションでは、充電中のEMC評価法に関する1テーマと、DWPT(Dynamic Wireless Power Transfer)による走行中給電に関する2テーマの発表があった。定置型の非接触充電では、接触充電と同様、充電電力は車両側の指示に従って充電設備側が制御する。これに対し、走行中給電では種々の容量の種々のSOC状態の車両に対して対応するために、車両側で整流する際に充電電力の大きさを制御する必要がある。後者に属す次の2件は2021年春季大会での発表(1)のその後に関するものである。(概要は、当誌、Vol. 11, No. 7, xEV Ⅰ・Ⅱ 参照)
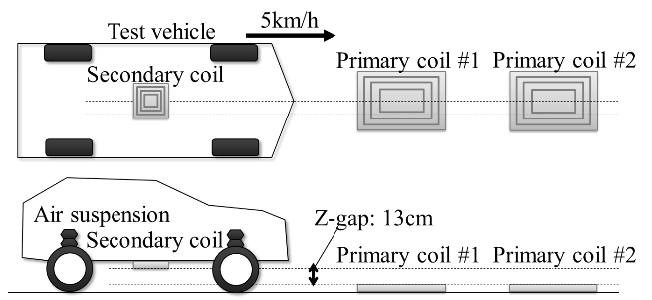
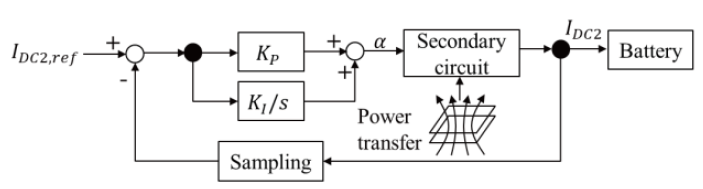
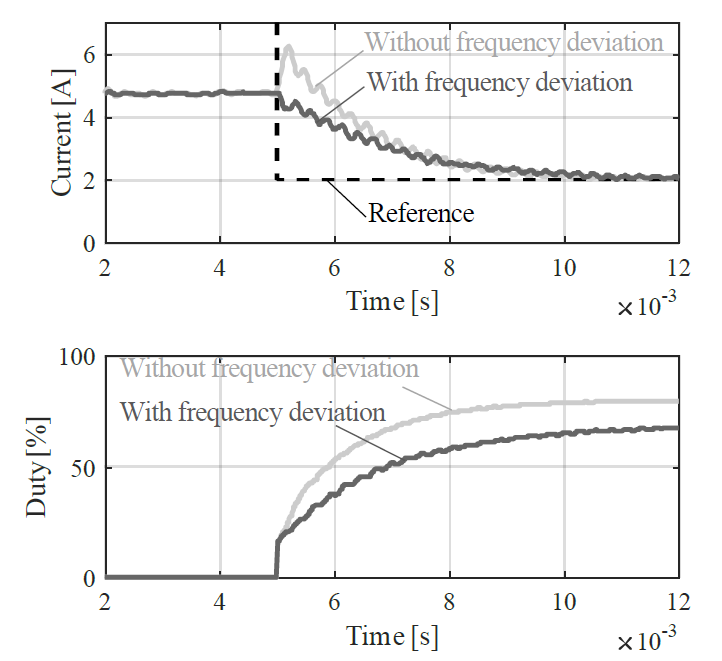
池村ら(2)は、電力調整をPWM(パルス幅変調)による方法に関して、路上に2個の送信側コイルを置き。市販HEVに停車中充電用の規格、SAE J2954のWPT1-Z3にそって製作したコイルを設置した図1(a)に概要を示す試験設備で、極低速で動作確認を行った結果を述べた。制御は目標充電電力に一致するように電池電流値をフィードバックする(図1(b))。試験の結果、ステップ入力に対してフィードバック制御に起因するとは考えにくい過応答が見られ、この原因を調査した結果、共振点のずれやアクティブ整流の影響によると考えられる電流の位相ずれが原因と考えられるとしている。この解決策として、受電側のキャリア周波数を5%下げることで位相が順次変わる方法を提案し、シミュレーションにより、図2に示すとおりステップ入力に対する過応答を防ぐことが出来るとしている。
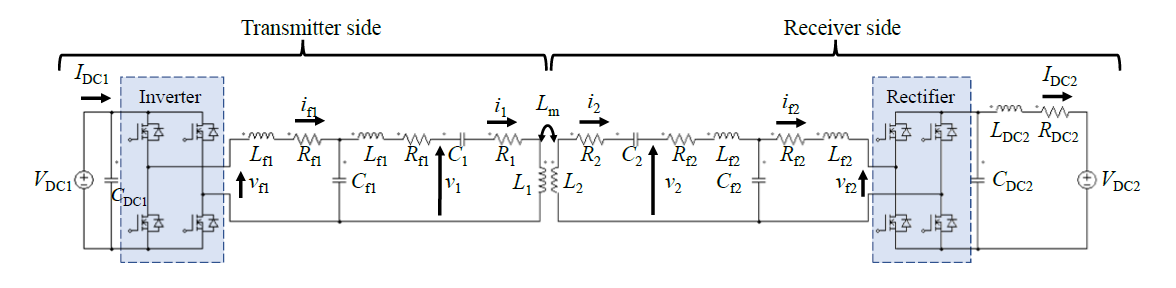
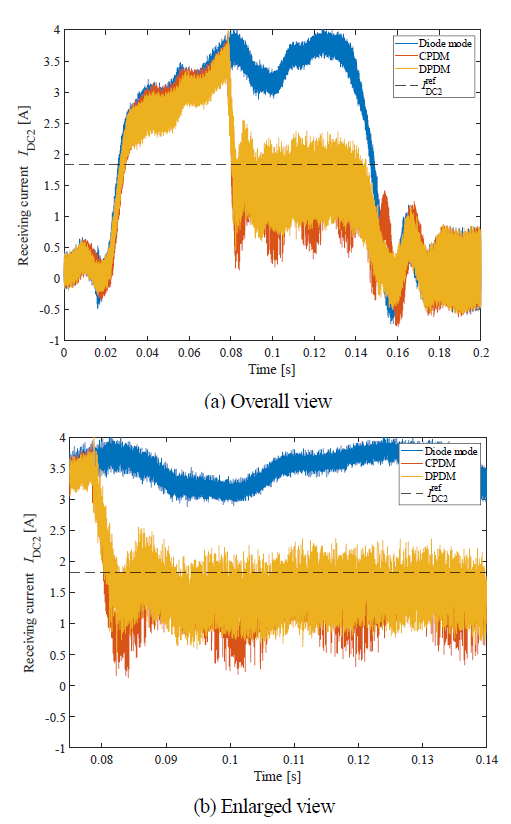
永井ら(3)は、電力調整にPDM(パルス密度変調;電流値がゼロの状態でスイッチングすることでスイッチングロスを低減)による既報の方法(1)に関して、路上コイルを高速で移動できるロータリ式の試験機で、前報での不都合点を解消するために実施した結果を紹介した。雑音等で電流のゼロクロスのタイミング計測にばらつきが多かった件は、雑音の少ない図3のif2を用いてi2のタイミングを推測することで解決した。ロータリ試験機で実施した40km/h走行時でステップ状に充電量を半減した際の電流挙動(図4 (a))とその拡大図(図4 (b))を図に示すとおり、必要期間、通電をバースト状に連続する方法で制御するCPDM(Concentrated Pulse Density Modulation)に比べて、通電状態を分散したDPDM(Distributed Pulse Density Modulation)が安定しているが、今後、より正確なゼロクロスタイミング取得が必要としている。
コメントを書く